Saimnieks LV / 2019.gads (Septembris.)
Aizvien biežāk visā pasaulē, tajā skaitā arī Latvijā, piena vadu, slaukšanas zāļu un citreiz pat slaukšanas karuseļu vietā fermu vadītāji izvēlas investēt slaukšanas robotos.
Veicot klientu aptauju ar mērķi noskaidrot populārākos argumentus par labu automātiskajām slaukšanas sistēmām, tika iegūtas pārsteidzoši dažādas un vispusīgas atbildes:
• slaucēja aizvietošana (izvairīšanās no cilvēciskā faktora);
• mazāk darba stundu (strādnieku skaita samazināšana);
• lētākas būvniecības izmaksas (salīdzinot ar slaukšanas zāli vai karuseli);
• nemainīgs slaukšanas process katru reizi (katrs slaucējs strādā savādāk/arī atkarībā no garastāvokļa);
• mazāks stress dzīvniekiem, lielāks komforts un miers (jo mazāka cilvēka iejaukšanās govju ikdienā, jo labāk);
• pieejams vairāk datu no dažādiem sensoriem (par dzīvnieku veselību var spriest attālināti, analizējot dažādus ar robota sensoriem iegūtos datus);
• uzlabojas piena kvalitāte (zemāks SŠS un baktēriju skaits);
• lielāks izslaukums (investīcija liek saimniekot efektīvāk, precīzāk);
• kaimiņu faktors (ja ir kaimiņam, tad vajag arī man);
• ar modernām tehnoloģijām piesaistīt jauno paaudzi (iespējamība, ka jaunieši paliks saimniecībā ir lielāka modernā robotizētā saimniecībā nekā ar smagu manuālo darbu piepildītā konvencionālās slaukšanas saimniecībā).
Strādniekus joprojām vajadzēs
Klientiem, sapņojot par slaukšanas procesa robotizāciju un vēršoties pie piegādātājiem ar savām vēlmēm, iekārtu ražotāju pārstāvjiem nākas sastapties ar nepatiesiem un plaši izplatītiem mītiem. Piemēram, iegādājoties slaukšanas robotus, var atbrīvot no darba gandrīz visus fermas darbiniekus un saimniecībā parādīties vien retu reizi. Tā ir ļoti maldīga uztvere par robotizētas saimniecības darbu. Tik un tā būs nepieciešami darbinieki, kas tīrīs guļvietas, dzirdnes, sniegs atnešanās palīdzību, aprūpēs jaundzimušos teļus, papildinās mazgājamo līdzekļu un citu robotu darbībai nepieciešamo izejvielu tvertnes, piedzīs kūtros dzīvniekus uz slaukšanu, sakops telpas un neļaus robotiem laika gaitā apaugt ar netīrumiem.

Padziļinājums slaukšanas robota aizmugurē ļauj ērti un droši apsekot problemātisku govju tesmeni roku augstumā un vajadzības gadījumā stobriņus pielikt manuāli.

Attēlā redzams viens no nevēlamiem pupu izvietojumiem, kas apgrūtina automātisku slaukšanas stobriņu pielikšanu.
Ja robots neatrod pupus
Vēl viens izplatīts mīts ir, ka slaukšanas robots katru govi slauks automātiski visas laktācijas laikā. Pietiek atcerēties par smagu pēcatnešanās tesmeņa tūsku ar īsiem, audos iegrimušiem pupu galiņiem, lai šis mīts pārstātu eksistēt. Protams, daļa saimniecību jaunpienu slauc kannā un tikai pēc tam apmāca govi slaukties robotā, taču jāņem vērā, ka tas ir dubults darbs darbiniekam un dubults stress govij. Dzīvniekam ir saprotamāk, ja to uzreiz apmāca slaukties robotā, nevis sākumā kannā. Tāpēc, izvēloties automātiskās slaukšanas iekārtu, jāņem vērā, vai šim konkrētajam slaukšanas robota modelim iespējams ērti un, galvenais, droši pielikt slaukšanas ķekaru manuāli. Tas ļautu jau pirmajā slaukšanas reizē sākt dzīvnieku apmācīt un pieradināt pie slaukšanas robota. Lai arī automātiskās slaukšanas iekārtas pēdējos gados ir strauji attīstījušās, tās vēl joprojām nespēj 100 % visām govīm automātiski pielikt slaukšanas stobriņus. Un tam ir pavisam vienkāršs izskaidrojums – gan roboti ar 3D kamerām, gan roboti ar lāzeriekārtām meklē četrus mērķus – pupus. Ja tesmeņa forma ir izteikti neregulāra, pakaļējie pupi ir krustā, cieši saspiedušies kopā vai ir citas novirzes no normas, tad četru pupu vietā robots redz tikai 3 vai pat tikai 2, un šajā gadījumā automātiskā pielikšana ir traucēta vai pat neiespējama.
Parasti šādos gadījumos dzīvnieku un tā pēcnācējus brāķē. Tomēr ne katra saimniecība var atļauties brāķēt daļu govju ar neatbilstošiem tesmeņiem, jo bieži vien šādi dzīvnieki var būt augstražīgi. Arī šajā gadījumā būtu svarīga iespēja šādiem dzīvniekiem viegli, ērti un droši divas reizes dienā manuāli robotā pielikt slaukšanas ķekaru. Pie tam pastāv iespēja, ka pēc cietstāves un atnešanās kādām no šīm brāķējamām govīm tesmenis kļūs pierietējis, pupu pozīcija var izmainīties un robots spēs stobriņus pielikt automātiski. Tāpēc slaukšanas robotu pirmajā darbības gadā nevajadzētu brāķēt govis, kas atrodas laktācijas beigu daļā ar neatbilstošiem tesmeņiem. Var izrādīties, ka daļai no dzīvniekiem pēc atnešanās tesmeņa forma kļūs piemērotāka automātiskajai slaukšanai. Kā vēl viens pluss vieglai un pārredzamai piekļūšanai govs tesmenim roku augstumā ir iespēja ērti veikt tesmeņa apskati, masāžu, ziedes uzklāšanu, aseptisku piena paraugu noņemšanu, intramammāru injektoru ievadīšanu un cietlaišanas manipulāciju veikšanu.
Nedrīkst aizmirst, ka jebkādu sāpīgu procedūru vai injekciju administrēšana slaukšanas robotā ir aizliegta, pat slaukšanas beigās. Jāsaprot, ka dzīvniekam sāpīgā pieredze paliks atmiņā un slaukšanas robots asociēsies ar briesmām un ciešanām. Pēc šādas negatīvas pieredzes dzīvnieki var pilnībā atteikties brīvprātīgi apmeklēt slaukšanas iekārtu, savukārt, piedzenot to, dzīvniekam lielā daudzumā izdalīsies stresa hormoni, kas kavēs oksitocīna atbrīvošanos un iedarbību uz tesmeņa audiem – piens netiks pilnvērtīgi atdots, dzīvnieks var pat tikt brāķēts.

Slaukšanas stobriņu pielikšana ar roku.
Ne visas govis brīvprātīgi apmeklēs robotu
Viens no populārākajiem mītiem par automātisko slaukšanu ir tas, ka, saimniekuprāt, pilnīgi visas govis no atnešanās līdz pat cietlaišanai brīvprātīgi apmeklēs slaukšanas robotu un tās nekad nebūs nepieciešams piedzīt. Diemžēl šī mīta izplatīšanos sekmējuši arī negodprātīgi automātisko slaukšanas iekārtu pārdevēji, lai pārliecinātu svārstīgus vai ne tik kompetentus klientus par labu slaukšanas robota iegādei. Ieteikums potenciālajiem slaukšanas robotu īpašniekiem – ja jums kāds automātiskās slaukšanas iekārtu pārdevējs sola, ka nekad nevienu govi nebūs nepieciešams piedzīt, jūsu pašu labā ieteicams, lai ar šo pārdevēju tā būtu pēdējā tikšanās reize. Diemžēl tie ir klaji meli vai arī pilnīgs automatizētās slaukšanas ganāmpulka menedžmenta izpratnes un kompetences trūkums.
Ja uzskatāt, ka govis iet slaukties robotā tāpēc, ka tām ir ar pienu pierietējis tesmenis, jūs rūgti maldāties. Pats slaukšanās process kā motivators dzīvnieku vizītēm robotā ir viens no visvājākajiem. Īstenais iemesls, kāpēc govis vēlas vai nevēlas apmeklēt slaukšanas robotu, ir bads (sauksim lietas īstajos vārdos). Atšķirībā no konvencionālās slaukšanas fermas, kur barības deva uz barības galda tiek aprēķināta, vadoties pēc saimniecības vidējā izslaukuma, automātiskās slaukšanas fermā ir jāpanāk, ka uz barības galda enerģētiskā barība tiek iedota nedaudz mazāk, savukārt atlikusī starpība tiek izsniegta slaukšanas robotā aromātisku un augstvērtīgu granulu formā. Jo lielāks enerģētiskās barības mīnuss ir uz barības galda, jo biežāk slaucamās govis vēlēsies apmeklēt robotu un jo vairāk granulu robotā būs nepieciešams izsniegt, lai kompensētu šo starpību. Jāpatur prātā, ka augstražīgām govīm ir lielāks enerģijas patēriņš, savukārt zemākas ražības govīm, tāpat govīm laktācijas beigās nepieciešamība pēc enerģētiskās barības ir daudz zemāka. Tāpēc tīri fiziski nav iespējams tik lielā mērā samazināt enerģijas daudzumu uz barības galda, lai slaukšanas robotu apmeklētu arī visas laktācijas beigās esošās govis, jo šis lielais enerģijas samazinājums būs robotā jākompensē arī augstražīgajām govīm.
Piemēram, slaukšanas grupā ir govis ar izslaukumu 55 litri dienā, kā arī govis laktācijas beigās ar izslaukumu 20 litri dienā. Ja vēlamies panākt, lai robotu apmeklētu arī laktācijas beigās esošās govis, enerģētiskās barības daudzumu uz barības galda būs nepieciešams aprēķināt zem 20 litriem piena. No tā izriet, ka augstražīgajām govīm robotā būs nepieciešams saņemt trūkstošo enerģiju granulu formā, kas ekvivalenta vismaz 35 litriem piena. Tik lielu nepieciešamo daudzumu govs vienā slaukšanās reizē nepaspēs apēst, tas ir ekonomiski neizdevīgi, pat ja tās paspētu apēst, tad visticamāk aizietu bojā no smagas spurekļa acidozes. Šāda problēma parasti rodas nelielās ģimenes saimniecībās ar vienu slaukšanas robotu, kur slaucamo govju grupēšana augstražīgajās un zemākas ražības govīs nav iespējama.
Ir eksperimentāli noskaidrotas salīdzinoši drošas maksimālās koncentrētās barības (granulu) devas, ko dzīvniekam drīkst izbarot vienā reizē bez riska iegūt subklīnisko vai klīnisko acidozi. Šis daudzums tieši atkarīgs no granulu sastāva – receptes, ko pircējiem nav nemaz tik viegli iespējams noskaidrot. Granulu ražotāji parasti aizbildinās, ka tas ir komercnoslēpums, un klientam sniedz tikai uzturvērtību sarakstu, kas principā neatspoguļo granulu patieso sastāvu. Kāpēc ir tik svarīgi izvēlēties konkrētu sastāvu robota granulām? Viss ir ļoti vienkārši – visbiežāk granulu sastāvā dominē dažādu veidu graudi (līdz 80 %, pat 90 %), kas kā izejviela ir viena no lētākajām, taču tai ir viena nevēlama īpašība – spureklī šie graudu izcelsmes ogļhidrāti ļoti strauji fermentējas un ievērojami samazina spurekļa pH līdz SARA (subklīniskās acidozes) līmenim. Šāds dzīvnieks retāk iet uz robotu un barības galdu, vairāk laika pavada guļvietās un ilgāk atgremo, lai ar siekalu palīdzību (satur nātrija bikarbonātu) atjaunotu optimālu spurekļa pH. Tāpēc, veidojot robotu granulu recepti, ir svarīgi pēc iespējas mazāk izmantot graudus un aizstāt tos ar izejvielām, kas satur lēni fermentējamus ogļhidrātus. Un šeit var parādīties plaisa starp klientu un iekārtu piegādātāju. Šajā brīdī ir svarīgi, vai iekārtu piegādātāja darbinieku rindās ir tikai dzimuši pārdevēji, kuri var pārdot jebko un jebkam, un tehniķi, kuru uzdevums ir veikt montāžu, servisu un remontu. Vai arī iekārtu izplatītājs nav žēlojis līdzekļus kompetenta speciālista algošanai, kas varēs sniegt ganāmpulka menedžmenta un veterinārās konsultācijas pirms un pēc slaukšanas iekārtu palaišanas.
Novērots, ka bez govīm, kas atrodas laktācijas beigās, arī vecākas govis var kūtrāk apmeklēt slaukšanas robotus. Ikdienā 2–6 % piedzenamo govju būtu jāuztver kā norma un ar to ir nepieciešams rēķināties. No iepriekš minētā var secināt, ka brīvā tipa govju kustības saimniecībās veiksmīgas darbības priekšnosacījums ir pastāvīgs darbs un izpratne par to, kā nodrošināt precīzu un pareizi sabalansētu barības devu uz barības galda un granulu daudzumu slaukšanas robotā. Tieši šī nepieciešamība pēc barības devas precizitātes un tās nemainīguma bieži vien ir iemesls straujam izslaukuma pieaugumam pēc pāriešanas uz robotizēto slaukšanu. Diemžēl pa retam gadās arī precedenti, kad klients iegādājas slaukšanas robotu ar domu, ka nu tagad nekas vairs nebūs jādara, un savā vieglprātībā un nekompetencē noved potenciāli perspektīvu saimniecību līdz bankrotam.
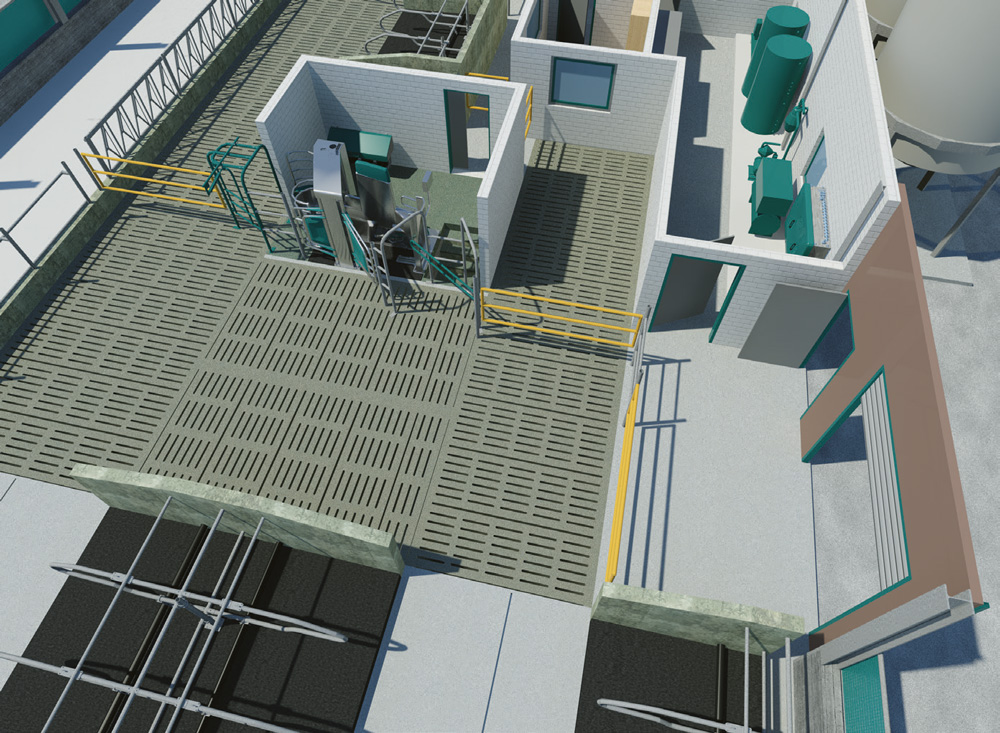
Brīvā tipa dzīvnieku kustības uzgaidāmais laukums bez nožogojuma un priekšselekcijas vārtiem.
Izvēle starp brīvā un virzītā tipa dzīvnieku kustību
Vēl viens izplatīts mīts par robotizētās slaukšanas saimniecības menedžmentu – it kā neesot nekādas atšķirības starp brīvā tipa vai virzītā tipa dzīvnieku kustību, tāpēc nav vajadzības tērēt līdzekļus selekcijas vārtu iegādei un montāžai. Jāpiebilst, ka katram no minētajiem dzīvnieku kustības modeļiem ir savi plusi un mīnusi. Brīvā tipa dzīvnieku kustības modelī govīm tiek nodrošināti optimālākie labturības apstākļi.
Dzīvnieki brīvi izvēlas, kā pavadīt savu ikdienu fermas grupā – kad iet ēst, gulēt, slaukties vai socializēties ar pārējām govīm. Taču šādai brīvā tipa dzīvnieku kustībai ir arī negatīva puse – šāds fermas plānojums pieprasa precīzu un konstantu barības devu ar pareizi saplānotu ogļhidrātus saturošās barības attiecību starp barības galdu un robota granulām. Šādas fermas vadītājam regulāri jāpārskata menedžmenta programmas atskaites par dzīvnieku apmeklējumiem robotā, izslaukumu un piedzenamo govju skaitu. Tiklīdz piedzenamo dzīvnieku skaits palielinās, tā jāveic korekcijas barības galdā. Arī karstais laiks ir izaicinājums.
Karstuma stresa ietekmē samazinās barības apēdamība un līdz ar to arī piena izslaukums. Tīri cilvēcīgi fermas atbildīgajam darbiniekam gribētos palielināt enerģētiskās barības daudzumu uz barības galda, lai kompensētu apēdamības samazināšanos. Taču brīvā tipa dzīvnieku kustības modelī ir tieši otrādi – enerģētiskās barības apjoms barības galdā pat ir jāsamazina, lai saglabātu slaucamo govju brīvprātīgu robotu apmeklēšanu.
Kā vēl viens negatīvs aspekts ir tūristu (pārāk aktīvas govis, kas, izejot ārā no robota, apmet nelielu apli un uzreiz dodas atpakaļ slaukšanas robotā, kaut gan nav pienācis tās slaukšanas laiks, tā lieki kavējot citas govis un samazinot robota kopējo ražību) ekstra vizītes ārpus paredzētā slaukšanas laika. Jāpatur prātā, ka pārāk liels tūristu īpatsvars var liecināt par pārāk pliekanu barības devu barības galdā. Virzītā tipa dzīvnieku kustības modelī ikdienā saimniekot ir salīdzinoši vieglāk, un šāds fermas plānojums piedod nelielas kļūdas vai aizmāršības barības devā un grupēšanā.
Salīdzinot ar brīvā tipa dzīvnieku kustības modeli, virzītā tipa modelim dzīvnieku ejās pirms barības galda ir vienvirziena vārtiņi (kas ļauj pārvietoties tikai no barības galda uz guļvietām), savukārt pirms robotu uzgaidāmā laukuma – selekcijas vārti, kas automātiski nosaka, vai dzīvniekam ir pienācis laiks slaukties vai arī tas ir jānovirza tālāk uz barības galdu. Tādējādi slaukšanas roboti tiek atslogoti no tūristēm un uzgaidāmajā laukumā nonāk tikai tās govis, kurām ir pienācis laiks slaukties. Kā vēl viens pozitīvs virzītās kustības aspekts − kāda hierarhijā augstāka govs, kas pie robota uzgaidāmajā laukumā laukumā terorizē vājākas govis, pēc slaukšanās uzreiz tiek novirzīta prom uz barības galdu, tādējādi atbrīvojot vietu vājākām govīm. Savukārt brīvā tipa kustības modelī šāda govs pēc iziešanas no robota var brīvi atgriezties pie robota ieejas un turpināt trenkāt augumā vai raksturā vājākās sugas māsas.
Viens no svarīgākajiem virzītās kustības ieviešanas ieguvumiem ir daudz mazāka nepieciešamība piedzīt govis uz slaukšanas robotu. Govīm, lai tiktu pie barības galda, sākumā ir jāiziet caur selekcijas vārtiem, kas nepieciešamības gadījumā tās novirzīs uz slaukšanas robotu. Līdz ar to, izmantojot šādu modeli, dzīvnieku piedzīšanu var samazināt gandrīz līdz nullei. Kāpēc tikai gandrīz līdz nullei? Tāpēc, ka saimniecībās vienmēr būs kāda govs ar klibumu, veselības problēmām, vēlu apsēklota govs ar zemu izslaukumu utt., kas tīri fizioloģisku iemeslu dēļ var pārāk daudz laika pavadīt guļvietās. Pie negatīvajiem virzītās kustības aspektiem jāatzīmē salīdzinoši lielākas izmaksas – selekcijas vārti ar atpazīšanu, nedaudz lielāks uzgaidāmais laukums un tā nožogojums, vienvirziena vārtiņi dzīvnieku ejās no barības galda. Arī apmācības process sākumā ir komplicētāks nekā brīvā tipa kustības fermās, jo dzīvniekiem ir jāiemāca pašiem pabīdīt vienvirziena vārtiņus un nebaidīties iziet caur vārtiem un gaiteņiem. Jāatzīmē, ka govis ir samērā gudri dzīvnieki un ļoti ātri apgūst pat sarežģītākos dzīvnieku gaiteņu labirintus.

Virzītās kustības sākumā ēd, tad slaucas uzgaidāmais laukums ar priekšselekcijas vārtiem un nožogojumu.
Kad parādījās pirmie slaukšanas roboti, tika izveidota virzītās kustības filozofija: sākumā ēst un tad slaukties. Tas nozīmē, ka lielākā daļa dzīvnieku uzturas pie barības galda un, kad ir pabeiguši ēst, virzās caur selekcijas vārtiem, kas savukārt vajadzīgos dzīvniekus novirza uz slaukšanas robotu, pārējos uz guļvietām. Šādam dzīvnieku kustības modelim ir vairāki trūkumi:
• govīm pēc barības uzņemšanas ir vēlme apgulties, tās var, pat neizejot caur selekcijas vārtiem, apgulties turpat mēslu ejā pie barības galda. Tas nav pieņemami no higiēnas un tesmeņa veselības apsvērumiem;
• paēdusi govs tiek novirzīta uz slaukšanos, izslaucas un tiek novirzīta uz guļvietām, kur parasti uzreiz apguļas. Arī tas ir nepieņemami, jo pēc slaukšanās pupa gala sfinkters noslēdzas tikai 20–30 minūšu laikā. Ja šāda govs atguļas netīrā guļvietā, ievērojami palielinās mastīta risks. Tieši šī apsvēruma dēļ viedāki konvencionālās slaukšanas fermu vadītāji organizē barības izdali, kamēr govis atrodas uzgaidāmā laukumā pirms slaukšanas zāles vai karuseļa. Atgriežoties no slaukšanas, tās uzreiz dosies pie barības galda, nevis apgulsies pēc padarītā darba ar nenoslēgtiem pupu galu sfinkteriem;
• salīdzinot ar dzīvnieku kustības filozofiju vispirms slaucies, tad ēd, šādam kustības modelim būs vairāk piedzenamo govju un mazāks slaukšanās reižu skaits, jo stimuls apgulties ir nesalīdzināmi vājāks par stimulu paēst.




 Saimnieks LV
Saimnieks LVKS Piena Loģistika desmit gadu jubileju sagaida ar vērienīgu izaugsmi, no 2...
 Saimnieks LV
Saimnieks LVVeterinārārste Līga Spūle ikdienā strādā ar visdažādākajām lauku saimniecīb...
 Saimnieks LV
Saimnieks LVAudzējot eksporta apjomus, investējot ārpus sprostu vistu novietnēs vairāk ...
 Saimnieks LV
Saimnieks LVNogriežoties no Kandavas–Sabiles ceļa uz Matkuli, pēc nepilna kilometra ceļ...